

Description
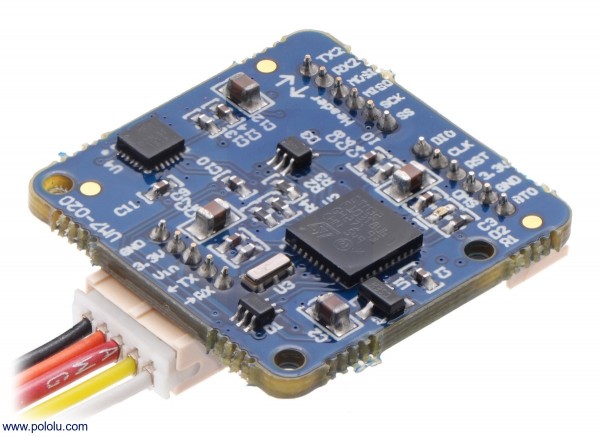
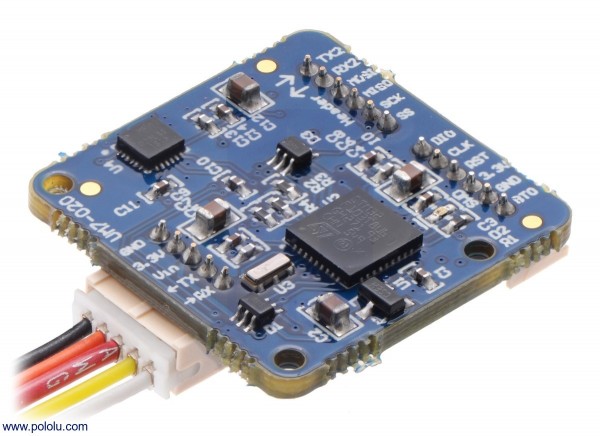
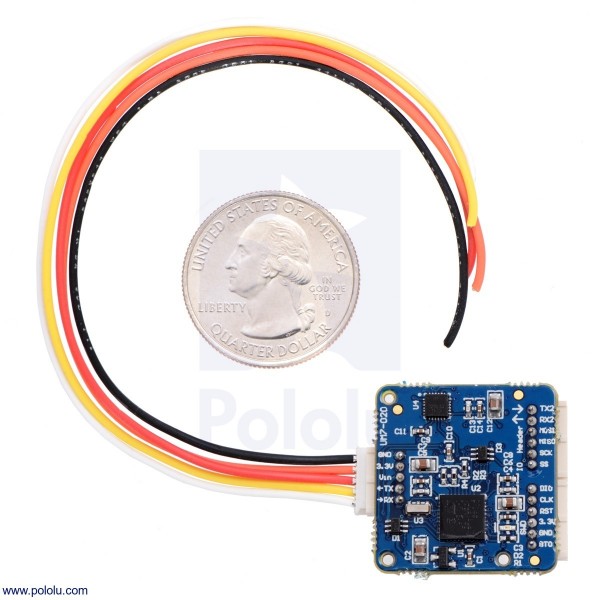
Der UM7-LT Orientierungssensor von Redshift Labs ist ein Attitude and Heading Reference System (AHRS), welches aus einem Drei-Achsen-Beschleunigungssensor, Wendesensor und Magnetometer besteht.
Im Gegensatz zu einer typischen inertiale Messeinheit (IMU), die nur rohe Sensormesswerte liefert, bietet die UM7 Einheit einen Onboard-Mikrocontroller, der Sensordaten mit Hilfe eines hoch entwickelten und erweiterten Kalman-Filter (EKF) verbindet und 500-mal pro Sekunde die Lage und Position bestimmt.
Die UM7 verfügt über eine Reihe von Verbesserungen gegenüber seinem Vorgänger (UM6). Zu nennen sind hier eine höherer Gyro-Bias-Stabilität und geringeres Rauschen, eine neue Kommunikationsarchitektur für verbesserte Flexibilität, optionale NMEA Paketübertragung, UTC-Zeit-Synchronisation mit externen GPS und Unterstützung der Temperaturkompensation für Sensoren.
Die Verbindung von Strom und der seriellen TTL-Kommunikation wird über einen polarisierten fünfpoligen Stecker an einer Seite und das im Lieferumfang enthaltene Kabel realisiert. Ein Paar sechspolige Erweiterungsleisten auf der anderen Seite des Boards bietet zusätzliche Anschlussmöglichkeiten, darunter eine alternative SPI-Schnittstelle und eine sekundäre serielle Schnittstelle, die mit einem externen GPS-Modul verbunden werden kann (z.B. ein LS20031 GPS-Empfänger).
Die Einheit wird ohne Gehäuse geliefert. Hier gibt es den UM7-LT Orientierungssensor mit Gehäuse.
Eigenschaften:
Sensoren und Processing
- Ausgezeichnete Gyro-Bias-Stabilität
- Regelbarer Tiefpassfilter und EKF Einstellungen bieten anpassbare Leistung für verschiedene Anwendungen
- Verwendung von externen GPS-Modulen möglich
- Temperaturkompensation für Sensoren
- Magnetometerkalibrierung kann mit der seriellen CHR-Schnittstellen-Software durchgeführt werden
Kommunikation
- Ausgangsdaten
- Lage und Kurs (Euler-Winkel)
- Lage-Quaternion
- Magnetometer, Beschleunigungsmesser, Gyro-Daten
- GPS-Höhe, Position, Geschwindigkeit (optional mit externem GPS)
- 3,3 V TTL serielle Schnittstelle (UART) mit Baudraten bis zu 921.600 bps, die Daten-Stream oder Updates auf Anfrage zur Verfügung stellen kann
- Die wichtigsten UART-Pins, TX und RX, sind 5V-tolerant
- Überträgt Daten von Menschen lesbare NMEA-Strings (bis zu 100 Hz), binäre Pakete (bis zu 255 Hz) oder eine Kombination aus beidem
- Flexible Kommunikationsarchitektur erlaubt der UM7 eine beliebige Kombination von Daten bei individuell einstellbaren Raten zu übertragen
- CHR Serial-Interface-Software für ermöglicht Echtzeit-Plotten von Sensordaten, Protokollierung, Gerätekonfiguration und Magnetometer-Kalibrierung
- SPI-Schnittstelle durch Erweiterungsanschluss
Spezifikationen:
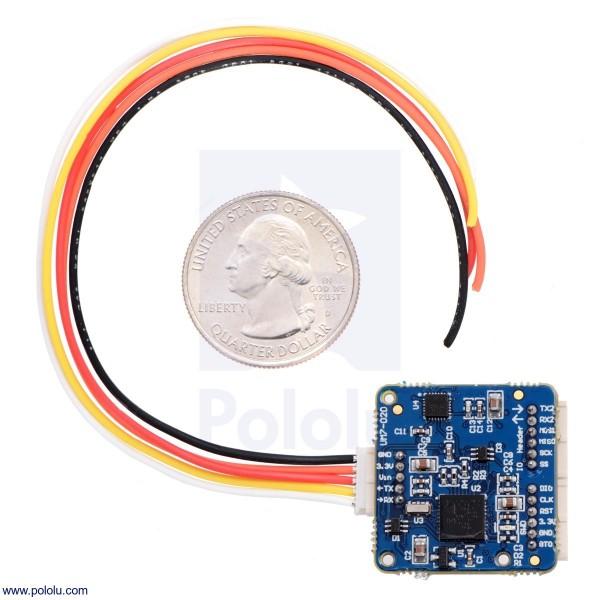
- Maße: 27 mm × 26 mm × 6.5 mm
- Gewicht: 3.5 g (ohne Kabel)
- Betriebsspannung: 4 V bis 5.5 V
- I/O-Logic-Level: 3.3 V (mit 5V-toleranten UART-Pins, TX und RX)
Lage und Kurs:
- EKF Estimation-Rate: 500 Hz
- ±1° typische statische Pitch / Roll Genauigkeit
- ±3° typische dynamische Pitch / Roll Genauigkeit
- ±3° typische statische Giergenauigkeit
- ±5° typische dynamische Giergenauigkeit
- 0.5° Winkelwiederholbarkeit
- 0.01° Winkelauflösung
Dokumente:
Encrypted payment
Your payment information is processed securely. We do not store credit card details nor have access to your credit card information.
Customs Tariff Number:
Country of origin:
This depends on where you are located. After the order is handed over to UPS, the delivery time in Germany is about 2-3 days, within Europe about 1 week.
We ship our orders with UPS (United Parcel Service).
If we still haven't answered your question, you can contact us below and we will get back to you as soon as possible.
